



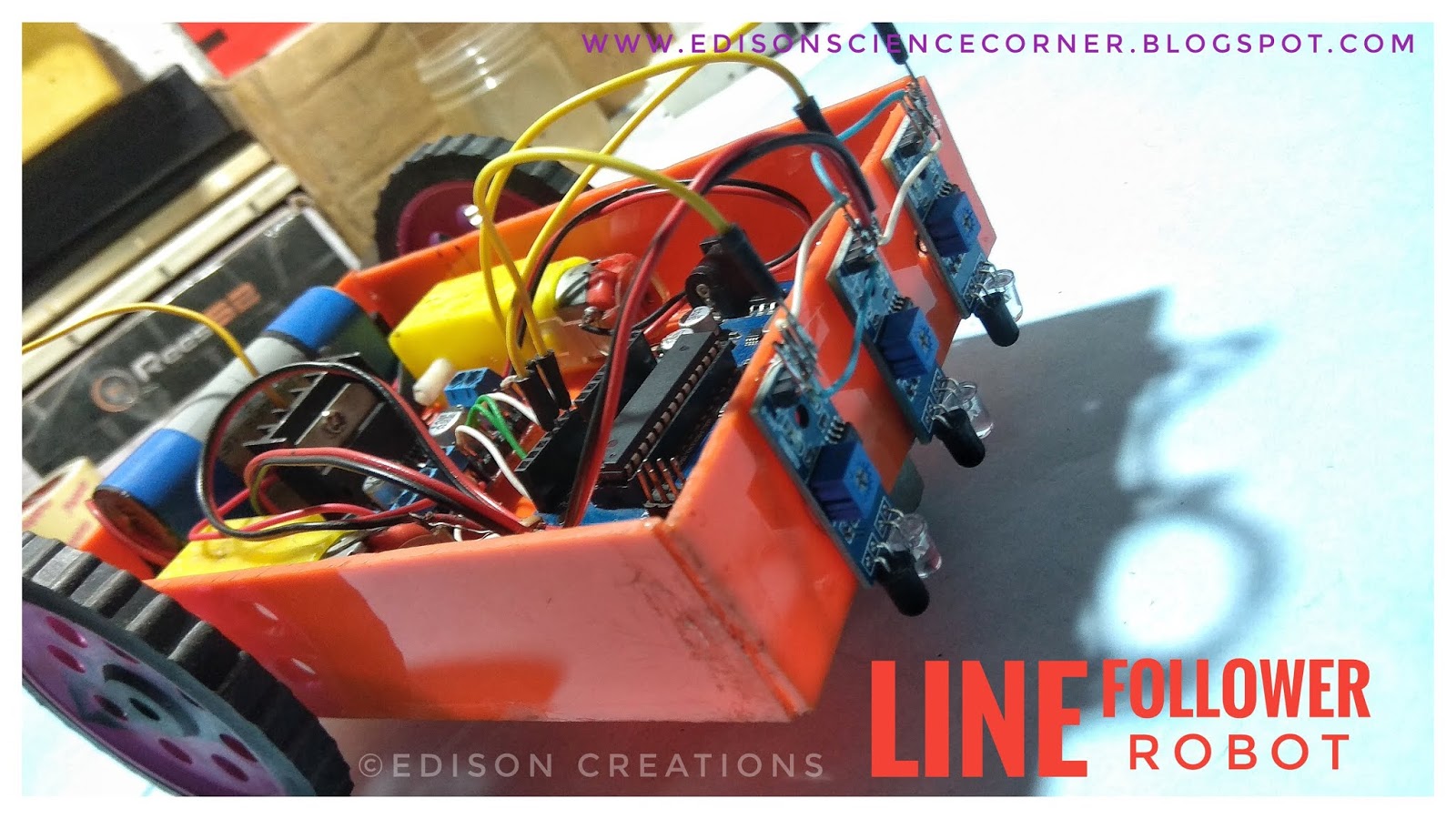

In this blog i am going to make a line follower robot using arduino with adjustable speed.


Working of Arduino Line Follower Robot
The working of the project is very simple bot will detect the black line on the surface and move along that line.
we need sensors to detect the line. For line detection logic, we used two IR Sensors, which consists of IR LED and Photo diode. They are placed in a reflective way i.e. side – by – side so that whenever they come in to white surface, the light emitted by IR LED will be detected by Photo diode . reflection of the white surface is high, the infrared light emitted by IR LED will be maximum reflected and will be detected by the Photo diode.
In case of black surface, which has a low reflection, the light gets completely absorbed by the black surface and doesn’t reach the photo diode.
Using the same principle, we will setup the IR Sensors on the Line Follower Robot such that the two IR Sensors are on the either side of the black line on the floor
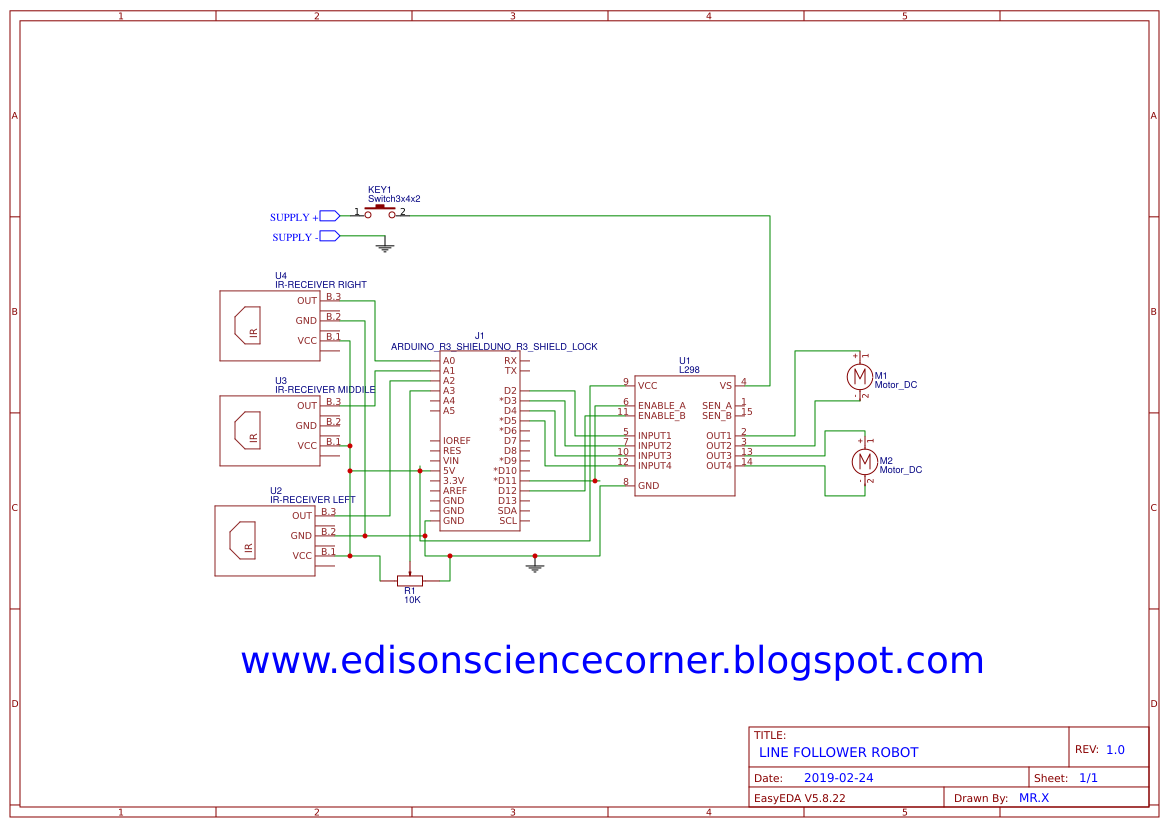
Follow the circuit diagram and complete the circuit
code and circuit

Leave a comment