

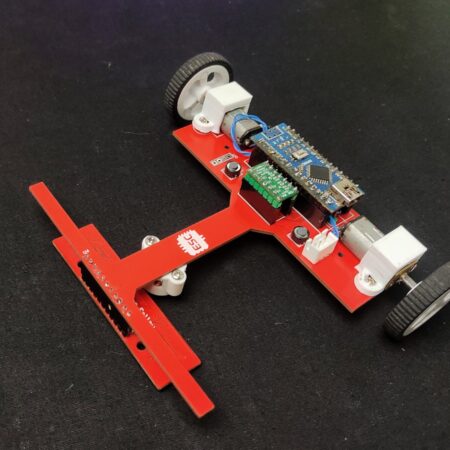








While a line-following robot may not be the newest project idea in the book, this one is a clean build using modern components and gets a good speed thanks to PID control feedback instead of the more traditional bang-bang control you see in low-end robots.
Of course, PIDs need tuning and that seems to be the weak link — you’ll have to experiment with the settings. The sensors also require calibration, but we bet both of those issues could be fixed pretty easily.
If the idea of PID is new to you, the acronym stands for proportional, integral, and derivative. To determine the output at any given time, you look at where you are compared to where you want to be (the present value vs the setpoint). Then you compute a proportional error. So, for a temperature, for example, if you want to be at 30 degrees and you are at 20 degrees, that is a proportional error of 10 degrees. You also want to look at how much change has been building up over time and the rate of change of the error.


Reviews
There are no reviews yet.